2019/11/21(木)kv-0.4.49
今回は、以前から溜めていた、
- 辺に特異性を持つ2変数関数の二重積分
- 一点に特異性を持つ2変数関数の二重積分
言葉で書くと簡単そうですが苦労しています。数値積分のページの第5,6節とか、辺及び一点にベキ型特異性を持つ2変数関数の二重積分を見て下さい。
init = [1; 1];
[T,X] = awa(@vdp, @vdp_J, [0, 20], init);
format long e
awa_disp(T,X);
function f = vdp(t, x)
mu = 1;
f = [x(2);
mu*(1-x(1)^2)*x(2)-x(1)];
end
function J = vdp_J(t, x)
mu = 1;
J = [typeadjust(0, x), typeadjust(1, x);
-2*mu*x(1)*x(2) - 1, mu*(1-x(1)^2)];
end
このように、ODEの右辺を定義する関数(ここではvdp)と、そのヤコビ行列を返す関数(ここではvdp_J)を定義し、関数awaを呼びます。awaの計算したデータを分かりやすく表示してくれるのがawa_dispです。ヤコビ行列を定義するのが面倒ですし、Intlabの持っている自動微分機能でなんとかなりそうな気がするのですが、高速化のためにやむを得なかったそうです。typeadjustという関数が使われていますが、関数の戻り値に定数があるときはこうやって型を補正する必要があります。
awaset('order',10,'h0',0,'EvalMeth',4,'AbsTol',1e-16,'RelTol',1e-16)
のような関数を使って、様々なパラメータを変更することができます(これらの値はデフォルト値)。変更したいパラメータの名前を奇数番目の引数に、値を偶数番目の引数に書きます。これを使って、LohnerのAWAを紹介した記事に合わせてTaylor展開の次数を24次にした、
init = [1; 1];
tic; [T,X] = awa(@vdp, @vdp_J, [0, 20], init, awaset('order', 24)); toc
format long e
awa_disp(T,X);
function f = vdp(t, x)
mu = 1;
f = [x(2);
mu*(1-x(1)^2)*x(2)-x(1)];
end
function J = vdp_J(t, x)
mu = 1;
J = [typeadjust(0, x), typeadjust(1, x);
-2*mu*x(1)*x(2) - 1, mu*(1-x(1)^2)];
end
を実行してみました。すると、次のような解が得られました。
経過時間は 20.973900 秒です。
t = 0
[y_1] = [ 1.000000000000000e+000, 1.000000000000000e+000] d([y_1]) = 0.00e+00
[y_2] = [ 1.000000000000000e+000, 1.000000000000000e+000] d([y_2]) = 0.00e+00
t = 1.911224186649680e-01
[y_1] = [ 1.169708666105268e+000, 1.169708666105269e+000] d([y_1]) = 6.66e-16
[y_2] = [ 7.615010659752849e-001, 7.615010659752856e-001] d([y_2]) = 4.44e-16
(中略)
t = 1.992657858092985e+01
[y_1] = [ 2.000739935214436e+000, 2.000739935214461e+000] d([y_1]) = 2.31e-14
[y_2] = [ 1.939352117515359e-001, 1.939352117517785e-001] d([y_2]) = 2.42e-13
t = 20
[y_1] = [ 2.008487917798417e+000, 2.008487917798427e+000] d([y_1]) = 7.99e-15
[y_2] = [ 2.328985430648321e-002, 2.328985430667890e-002] d([y_2]) = 1.96e-13
オリジナルのAWAのt=20における解は、t = 2.000000000000000E+001 [ 2.00848791779841E+000, 2.00848791779843E+000] 8.00E-015 4.0E-015 [ 2.32898543064796E-002, 2.32898543066811E-002] 2.02E-013 8.7E-012でした。どちらも精度保証付きソルバーなので、両者の共通部分に真の解があることになります。計算時間はオリジナルが0.81secだったのに対してこちらは20.97secと、かなり遅くなってしまっています。Bünger先生によるとかなり高速化の工夫をしたとのことですが、これがMATLABの限界でしょうか。
init = [1; 1];
[T,X,Xr] = verifyode(@vdp, [0, 20], init);
format long e
verifyode_disp(T,X,Xr,init);
function f = vdp(t, x, i)
mu = 1;
if nargin == 2 || isempty(i)
f = [x(2);
mu*(1-x(1)^2)*x(2)-x(1)];
else
switch i
case 1
f = x(2);
case 2
f = mu*(1-x(1)^2)*x(2)-x(1);
end
end
end
こちらはawaの方にあったヤコビ行列を書く必要はありません。その代わり、右辺を定義する関数にt, xに続く第3の変数が増えており、そこに自然数が与えられたらその番号に対応する右辺の式だけを計算して返すことが要求されています。これも高速化のためです。関数verifyodeで計算した値をverifyode_dispで表示するのはAWA toolboxと同じですが、渡す変数の数がT, X, Xrと3つに増えており、またverifyode_dispには初期値も渡す必要があります。
verifyodeset('order',12, 'h0',0,'loc_err_tol',1e-10,'shrinkwrap',1,'precondition',0,'blunting',0)
のようなオプションを第4引数に指定することによって動作をカスタマイズできます。AWAと違って非常にオプションが多く、またオプションの指定によって大きく性能が違うようなので、まずどんなオプションがいいか調べてみました。方程式は同じvan der Polでt=15まで計算、orderは18に固定して、区間幅の変化を調べてみました。それを行った結果が次のグラフです。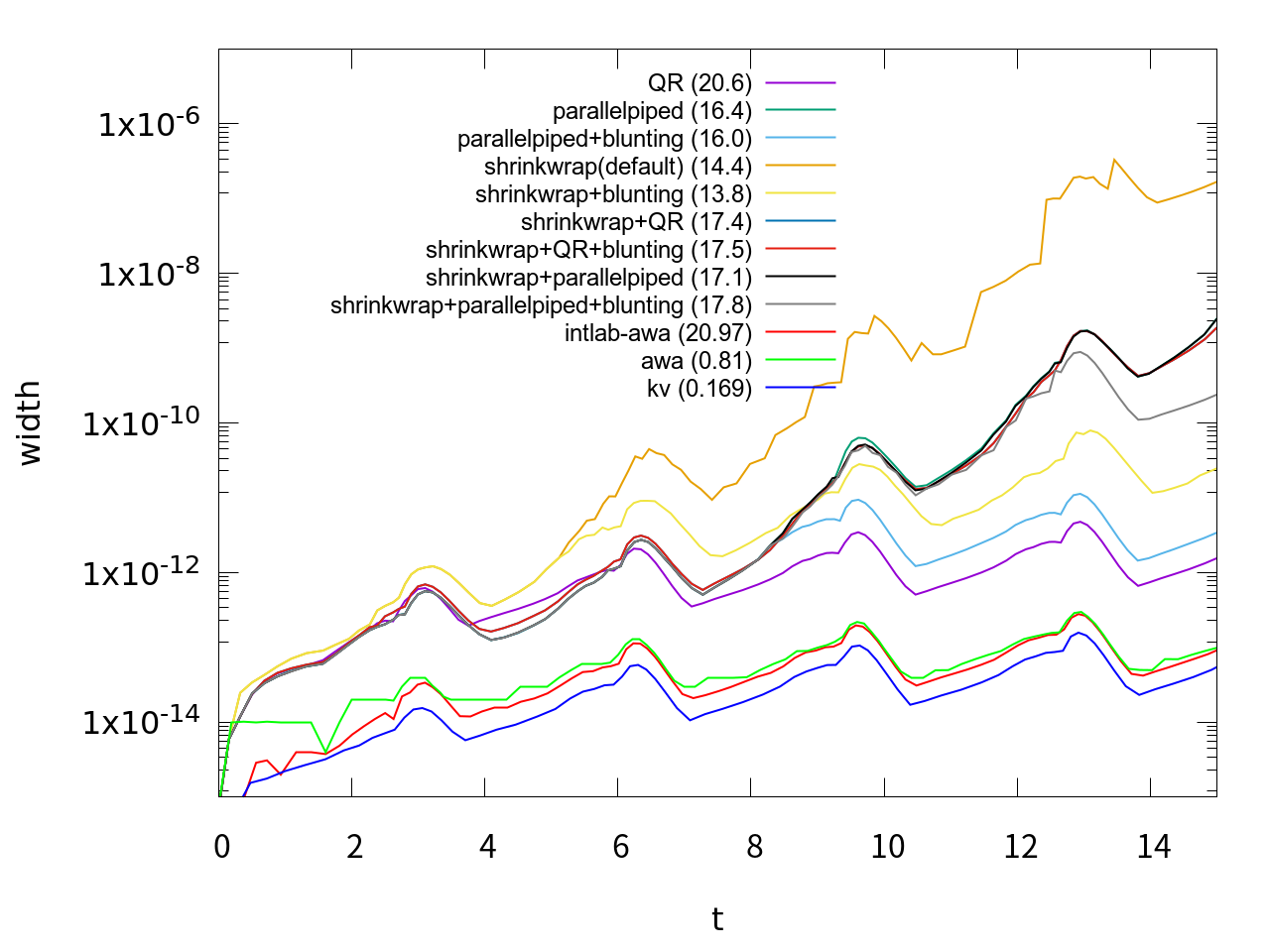
| shrinkwrap | precondition | blunting | |
|---|---|---|---|
| QR | 0 | 1 | 0 |
| parallelpiped | 0 | 2 | 0 |
| parallelpiped + blunting | 0 | 2 | 1 |
| shrinkwrap(default) | 1 | 0 | 0 |
| shrinkwrap + blunting | 1 | 0 | 1 |
| shrinkwrap + QR | 1 | 1 | 0 |
| shrinkwrap + QR + blunting | 1 | 1 | 1 |
| shrinkwrap + parallelpiped | 1 | 2 | 0 |
| shrinkwrap + parallelpiped + blunting | 1 | 2 | 1 |
init = [1; 1];
tic; [T,X,Xr] = verifyode(@vdp, [0, 20], init, verifyodeset('order', 24, 'loc_err_tol', 1e-10, 'shrinkwrap', 0, 'precondition', 1, 'blunting', 0)); toc;
format long e
verifyode_disp(T,X,Xr,init);
function f = vdp(t, x, i)
mu = 1;
if nargin == 2 || isempty(i)
f = [x(2);
mu*(1-x(1)^2)*x(2)-x(1)];
else
switch i
case 1
f = x(2);
case 2
f = mu*(1-x(1)^2)*x(2)-x(1);
end
end
end
すると、次のような解が得られました。
経過時間は 24.897000 秒です。
t = 0
[y_1] = [ 1.000000000000000e+000, 1.000000000000000e+000] d([y_1]) = 0.00e+00
[y_2] = [ 1.000000000000000e+000, 1.000000000000000e+000] d([y_2]) = 0.00e+00
t = 2.218563039351837e-01
[y_1] = [ 1.192420354444434e+000, 1.192420354444441e+000] d([y_1]) = 5.77e-15
[y_2] = [ 7.162286750812696e-001, 7.162286750812727e-001] d([y_2]) = 2.89e-15
(中略)
t = 1.986588757581453e+01
[y_1] = [ 1.983929113336597e+000, 1.983929113337129e+000] d([y_1]) = 5.31e-13
[y_2] = [ 3.648228353937841e-001, 3.648228353977482e-001] d([y_2]) = 3.96e-12
t = 20
[y_1] = [ 2.008487917798372e+000, 2.008487917798472e+000] d([y_1]) = 9.95e-14
[y_2] = [ 2.328985430522710e-002, 2.328985430793645e-002] d([y_2]) = 2.71e-12
少し精度が落ちているものの、同様に精度保証された解が得られました。計算時間は25秒弱とやや遅めです。
verifyodeset('order', 24, 'loc_err_tol', 1e-10, 'shrinkwrap', 0, 'precondition', 1, 'blunting', 0)
は試行錯誤の結果ですが、もっと良い設定があるかもしれません。情報は募集中です。当然、方程式や初期値が違えばまた最適値も変わる可能性が高いです。Taylor modelは前評判からするとやや性能が出ておらず、少しがっかりしています。
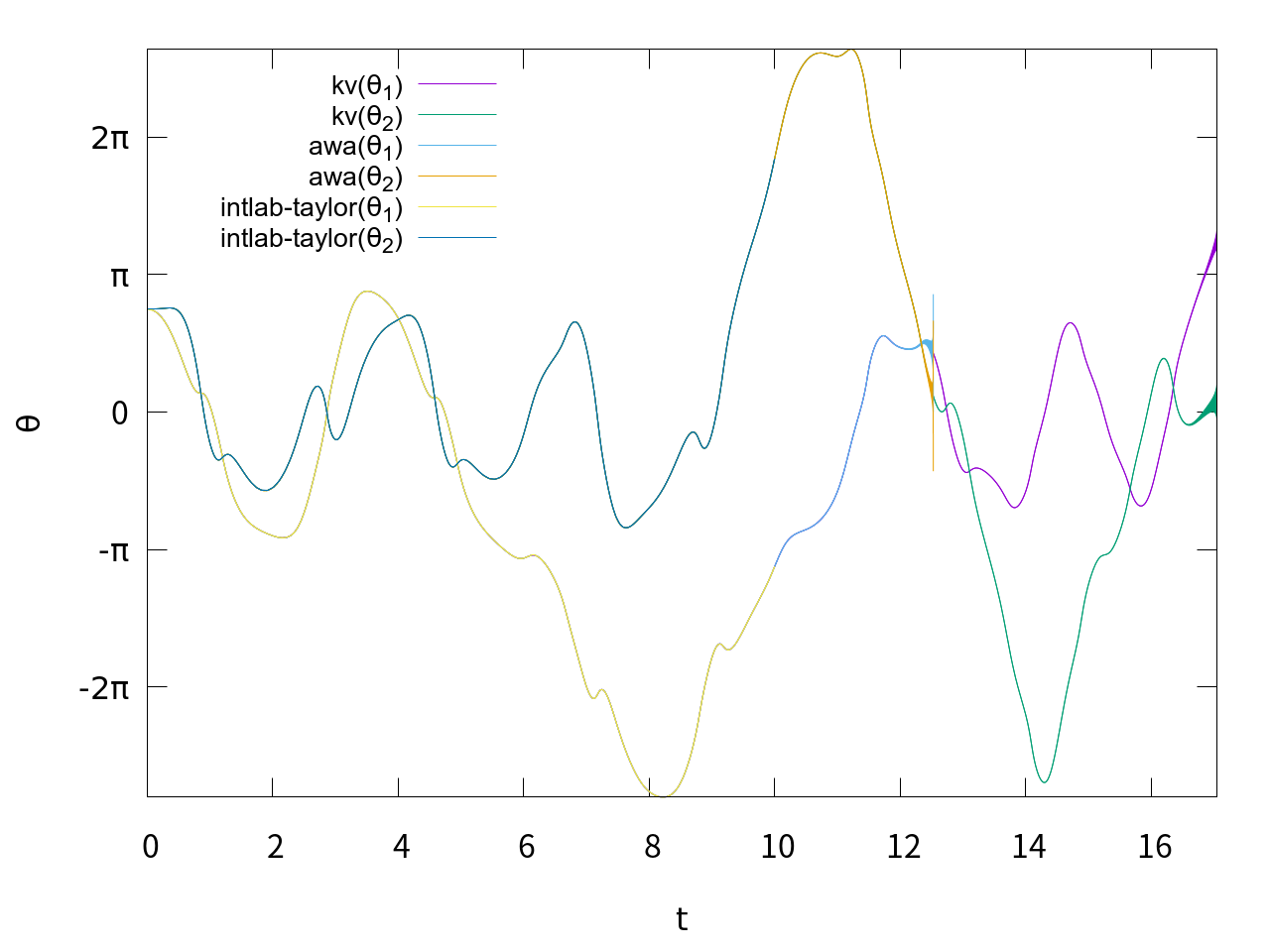
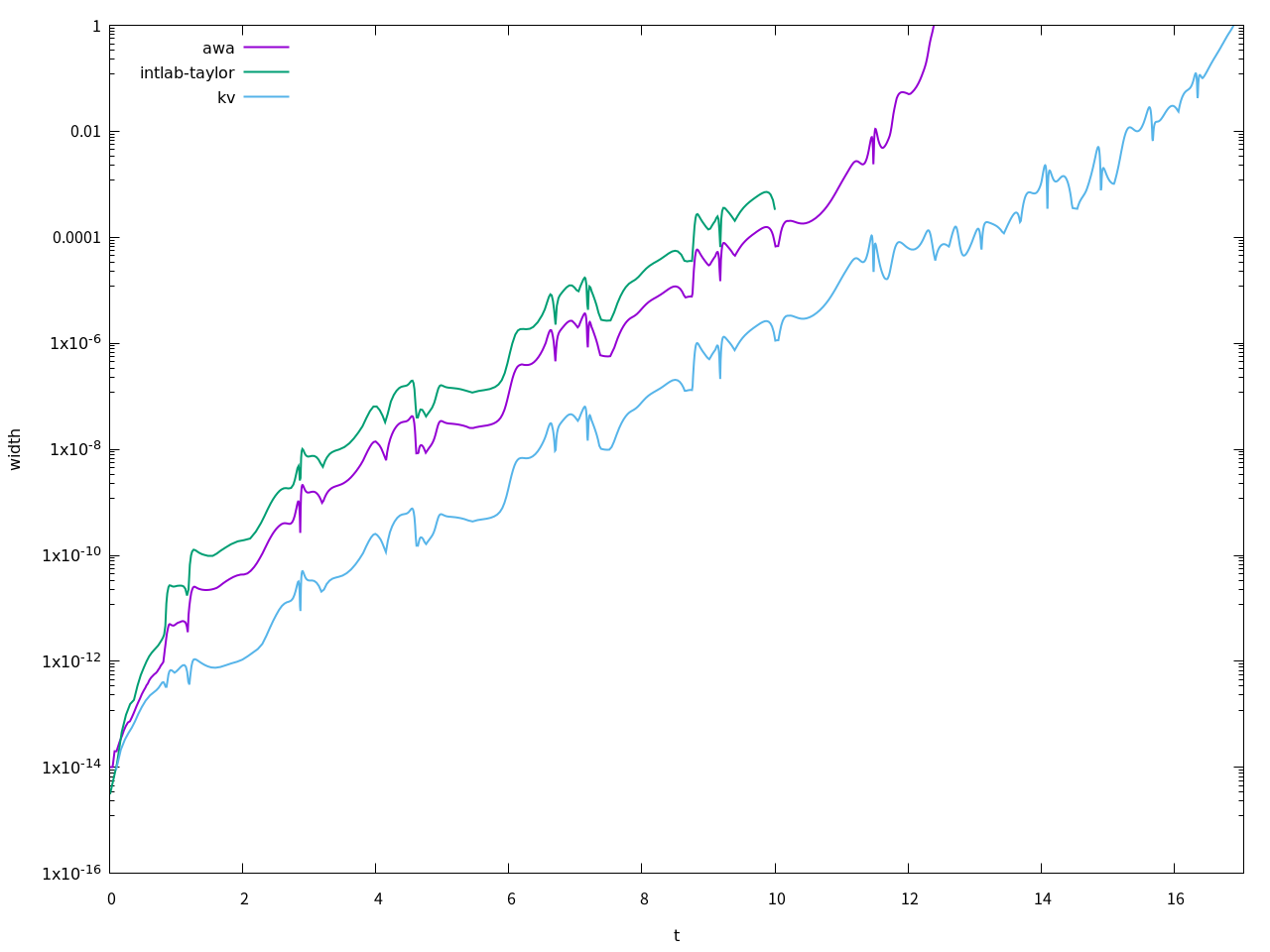
init = [intval('pi')*0.75; intval('pi')*0.75; 0; 0];
tic; [T,X,Xr] = verifyode(@doublependulum, [0, 11], init, verifyodeset('order', 24, 'loc_err_tol', 1e-10, 'shrinkwrap', 0, 'precondition', 1, 'blunting', 0)); toc;
format long e
verifyode_disp(T,X,Xr,init);
function f = doublependulum(t, x, i)
persistent g;
if (isempty(g))
g = intval('9.8');
end
m1 = 1;
m2 = 1;
l1 = 1;
l2 = 1;
t1 = cos(x(1) - x(2));
t2 = sin(x(1) - x(2));
a = (m1 + m2) * l1;
b = m2 * l2 * t1;
c = l1 * l2 * t1;
d = l2 * l2;
dt = a*d - b*c;
v1 = -m2 * l2 * x(4) * x(4) * t2 - (m1 + m2) * g * sin(x(1));
v2 = l1 * l2 * x(3) * x(3) * t2 - g * l2 * sin(x(2));
if nargin == 2 || isempty(i)
f = [x(3);
x(4);
(d * v1 - b * v2) / dt;
(-c * v1 + a * v2) / dt];
else
switch i
case 1
f = x(3);
case 2
f = x(4);
case 3
f = (d * v1 - b * v2) / dt;
case 4
f = (-c * v1 + a * v2) / dt;
end
end
end
AWAが、M1 = 1 M2 = 1 L1 = 1 L2 = 1 G = 9.8 T1 = cos(U1 - U2) T2 = sin(U1 - U2) A = (M1 + M2) * L1 B = M2 * L2 * T1 C = L1 * L2 * T1 D = L2 * L2 DT = A*D - B*C V1 = -M2 * L2 * U4 * U4 * T2 - (M1 + M2) * G * sin(U1) V2 = L1 * L2 * U3 * U3 * T2 - G * L2 * sin(U2) F1 = U3 F2 = U4 F3 = ( D*V1 - B*V2) / DT F4 = (-C*V1 + A*V2) / DT ;; 1 0 13 0 24 4 0 [2.35619449019234492884698253745961,2.356194490192344928846982537459636] [2.35619449019234492884698253745961,2.356194490192344928846982537459636] 0 0 n 1e-16 1e-16kvが、
#include <iostream>
#include <limits>
#include <kv/ode-maffine.hpp>
#include <kv/constants.hpp>
#include <kv/ode-callback.hpp>
namespace ub = boost::numeric::ublas;
typedef kv::interval<double> itv;
struct DoublePendulum {
template <class T> ub::vector<T> operator() (const ub::vector<T>& x, T t){
ub::vector<T> y(4);
ub::matrix<T> tm(2,2);
ub::vector<T> tv(2);
T a, b, c, d, t1, t2;
static const T m1 = T(1.);
static const T m2 = T(1.);
static const T l1 = T(1.);
static const T l2 = T(1.);
static const T g = kv::constants<T>::str("9.8");
t1 = cos(x(0) - x(1));
t2 = sin(x(0) - x(1));
a = (m1 + m2) * l1;
b = m2 * l2 * t1;
c = l1 * l2 * t1;
d = l2 * l2;
tm(0,0) = d;
tm(0,1) = -b;
tm(1,0) = -c;
tm(1,1) = a;
tm /= (a*d - b*c);
tv(0) = -m2 * l2 * x(3) * x(3) * t2 - (m1 + m2) * g * sin(x(0));
tv(1) = l1 * l2 * x(2) * x(2) * t2 - g * l2 * sin(x(1));
tv = prod(tm, tv);
y(0) = x(2);
y(1) = x(3);
y(2) = tv(0);
y(3) = tv(1);
return y;
}
};
int main()
{
ub::vector<itv> ix;
itv end;
std::cout.precision(17);
ix.resize(4);
ix(0) = 0.75 * kv::constants<itv>::pi();
ix(1) = 0.75 * kv::constants<itv>::pi();
ix(2) = 0.;
ix(3) = 0.;
// end = std::numeric_limits<double>::infinity();
end = 17.05;
kv::odelong_maffine(DoublePendulum(), ix, itv(0.), end, kv::ode_param<itv::base_type>().set_verbose(1));
}
です。IntlabのAWA toolboxは、関数のヤコビ行列を書くのが面倒で試しませんでした。